국내 최초! 우주 채광 로봇 등장
15:26, March 17, 2025
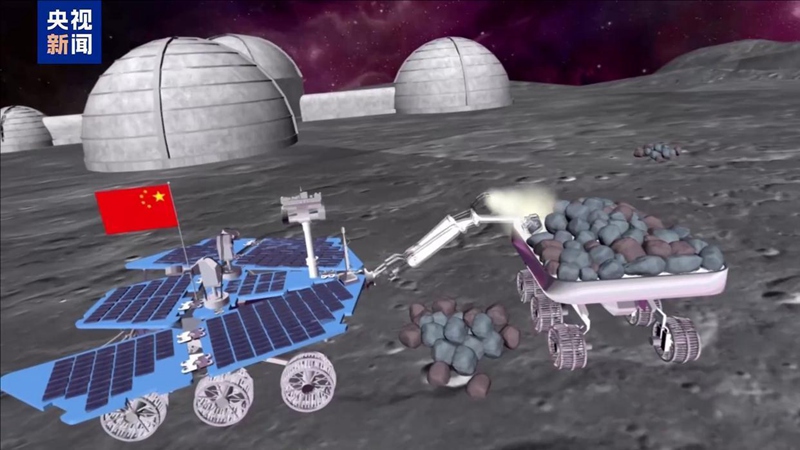 |
최근 중국 최초의 우주 채광 로봇이 중국광업대학교에서 탄생했다.
우주 채광 로봇의 기본 형태는 6개의 다리로 구성되어 있으며, 이 중 3개는 바퀴형 다리이고 3개는 발톱형 다리로, 우주의 미세 중력 환경에 적응할 수 있도록 설계되었다. 이 로봇은 모의 월면 토양 환경에서 걸음, 고정, 심지어 샘플 채취까지 가능하다. 현재 우주 채광 로봇 프로토타입은 관련 부처에 특허를 출원했으며, 초심을 통과했다.
원문 출처: 인민망 한국어판
